Delta-Six ( Jerry426 variant )
Discussion in '3D printers' started by Martin Bogomolni, Sep 30, 2016.
Delta-Six ( Jerry426 variant )
Discussion in '3D printers' started by Martin Bogomolni, Sep 30, 2016.
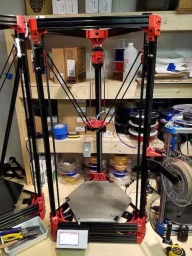
Building a Delta-6 variant, using recycled parts from a WolfStock Delta printer.
Page 1 of 2
Page 1 of 2